

- 1.47 MB
- 4页
- 1、本文档共5页,可阅读全部内容。
- 2、本文档由网友投稿或网络整理,如有侵权请及时联系我们处理。
'水利水电技术第45卷2014年第7期双频识别声纳技术在水工建筑物水下外观病害检测中的应用徐毅,赵钢,王茂枚,王春关,朱大栋(江苏省水利科学研究院,江苏南京210017)摘要:针对水工建筑物水下外观病害的类型特点,提出用双频iT..j|Jq声纳技术进行检测,并在工程实践中开展应用。实践表明,双频识别声纳技术对水工建筑物水下外观病害具有较好的检测效果,研究内容可为水工建筑物安全监测提供参考。关键词:双频识别声纳;水工建筑物;水下外观病害检测中图分类号:TV698.1文献标识码:B文章编号:1000.0860(2014)07-0103—04Applicationofdual-frequencyidentificationsonartodetectionofunderwaterapparentdefectofhydraulicstructureXUYi,ZHAOGang,WANGMaomei,WANGChunmei,ZHUDadong(HydraulicResearchInstituteofJiangsuProvince,Nanjing210017,Jiangsu,China)Abstract:Inaccordancewiththetypesandfeaturesoftheunderwmerapparentdefectsofthehydraulicstructures,theadoptionofthetechniqueofdual-frequencyidentificationsonarforthedetectionofdefectisproposedandthenappliedtOtheengineeringpracticeconcerned.Thepracticeshowsthatbettereffectofdetectingtheunderwaterapparentdefectsofthehydraulicstructurescallbeobtainedfromthetechniqueofdual—frequencyidentificationSoilar,thusthisstudycanprovidesomereferencesforthesafetymonitoringonhydraulicstructures.Keywords:dual-frequencyidentificationsonar;hydraulicstructures;detectionofunderwaterapparentdefect1引言水闸、泵站、船闸等水工建筑物由于长期运行和频繁启用,建筑物及附属设施会不断老化⋯。特别是建成年代较早的建筑物,由于设计标准及施工、管理水平偏低,病险率更高。地基不均匀沉降、渗流控制不当、混凝土结构老化、水流气蚀及磨损等因素都会造成水工建筑物出现各类水下病害[2‘3]。水下病害检测是水工建筑物安全检测的重要内容,其检测结果是进行水工建筑物安全鉴定和评价的重要依据。如何有效地对水工建筑物水下病害进行检测十分重要。对此,本文提出运用双频识别声纳技术进行水工建筑物水下病害检测,并在多个大中型水利工程中进行了实践应用。在各类水下病害中,有些是属于可见、可探摸的外观病害,如裂缝、磨损、塌陷等,水下病害的绝大WaterResoutm_sandHyd’叩MEnginemngV01.45No.7部分都是这一类;有些是属于不可见、但可探摸的,如止水损坏,由于其位于伸缩缝内,仅凭视觉去判别是否损坏比较困难,需要探摸获得;还有些是属于既不可见、也不可探摸的,如水闸底板的基底淘空,必须借助特殊的检测手段得到。对于水工建筑物水下检测而言,能够得到水下外观病害情况,已可基本满足水工建筑物安全鉴定和评价的需要,因此对水下外观病害的检测应是水下检测的重点。本文研究双频识别声纳检测的主要对象也是水下外观病害。2双频识别声纳的基本理论2.1工作原理双频识别声纳是一种利用超声波获得高分辨率、收稿日期:2013—05.16作者简介:徐毅(1980一),男,硕士。103
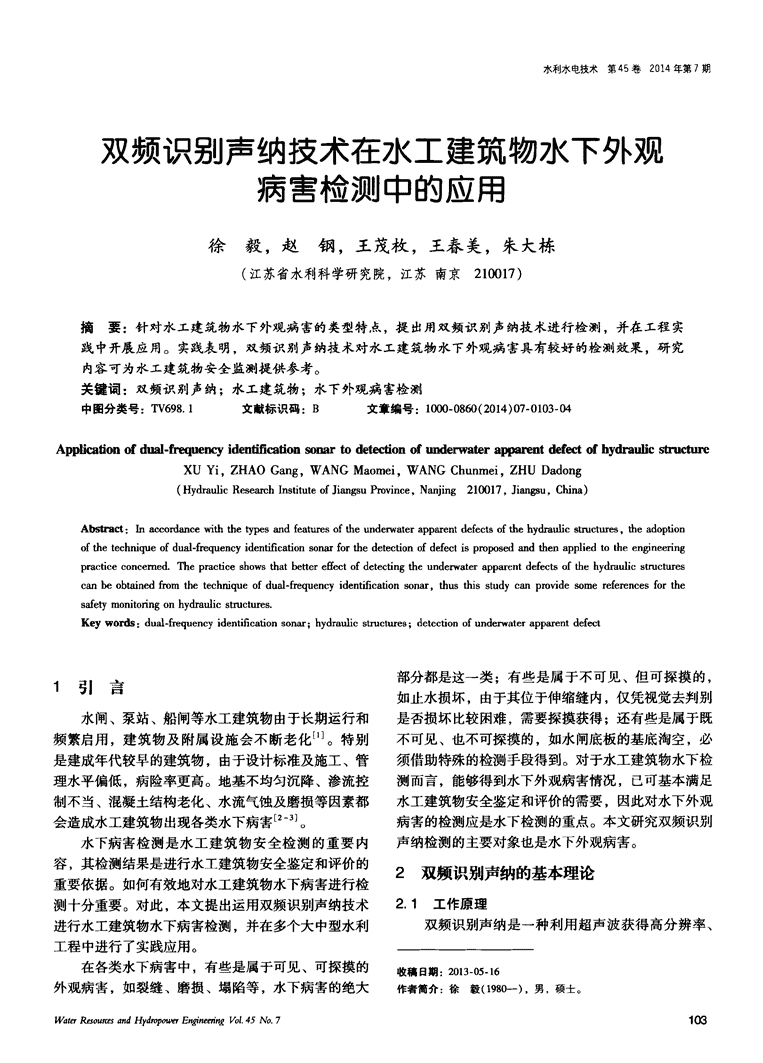
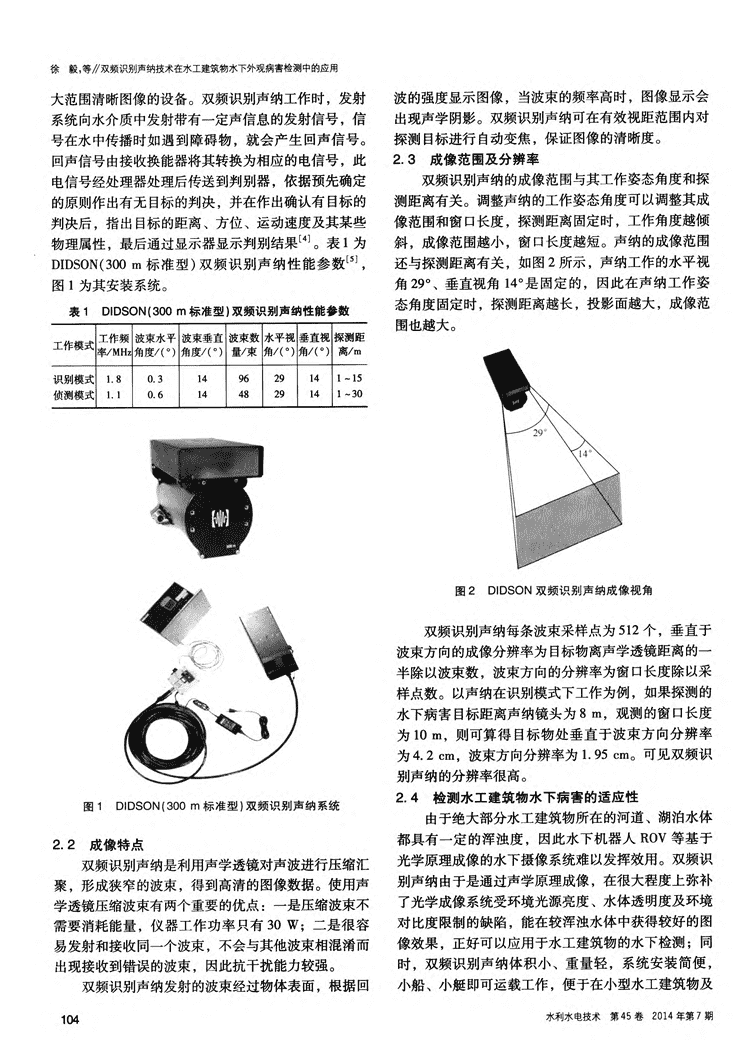
徐毅,等∥双频识别声纳技术在水工建筑物水下外观病害检测中的应用大范围清晰图像的设备。双频识别声纳工作时,发射系统向水介质中发射带有一定声信息的发射信号,信号在水中传播时如遇到障碍物,就会产生回声信号。回声信号由接收换能器将其转换为相应的电信号,此电信号经处理器处理后传送到判别器,依据预先确定的原则作出有无目标的判决,并在作出确认有目标的判决后,指出目标的距离、方位、运动速度及其某些物理属性,最后通过显示器显示判别结果MJ。表1为DIDSON(300nl标准型)双频识别声纳性能参数bJ,图1为其安装系统。表1DIDSON(300m标准型)双频识别声纳性能参数工作频波束水平波束垂直波束数水平视垂直视探测距工作模式=率/MHz角度/(。)量/束角/(。)离/m识别模式1.80.314962914l~15侦测模式1.10.6144829141~30图1DIDSON(300m标准型)双频识别声纳系统2.2成像特点双频识别声纳是利用声学透镜对声波进行压缩汇聚,形成狭窄的波束,得到高清的图像数据。使用声学透镜压缩波束有两个重要的优点:一是压缩波束不需要消耗能量,仪器工作功率只有30W;二是很容易发射和接收同一个波束,不会与其他波束相混淆而出现接收到错误的波束,因此抗干扰能力较强。双频识别声纳发射的波束经过物体表面,根据回104波的强度显示图像,当波束的频率高时,图像显示会出现声学阴影。双频识别声纳可在有效视距范围内对探测目标进行自动变焦,保证图像的清晰度。2.3成像范围及分辨率双频识别声纳的成像范围与其工作姿态角度和探测距离有关。调整声纳的工作姿态角度可以调整其成像范围和窗口长度,探测距离固定时,工作角度越倾斜,成像范围越小,窗口长度越短。声纳的成像范围还与探测距离有关,如图2所示,声纳工作的水平视角290、垂直视角14。是固定的,因此在声纳工作姿态角度固定时,探测距离越长,投影面越大,成像范围也越大。图2DIDSON双频识别声纳成像视角双频识别声纳每条波束采样点为512个,垂直于波束方向的成像分辨率为目标物离声学透镜距离的一半除以波束数,波束方向的分辨率为窗口长度除以采样点数。以声纳在识别模式下工作为例,如果探测的水下病害目标距离声纳镜头为8ITI,观测的窗口长度为10111,则可算得目标物处垂直于波束方向分辨率为4.2cm,波束方向分辨率为1.95om。可见双频识别声纳的分辨率很高。2.4检测水工建筑物水下病害的适应性由于绝大部分水工建筑物所在的河道、湖泊水体都具有一定的浑浊度,因此水下机器人ROV等基于光学原理成像的水下摄像系统难以发挥效用。双频识别声纳由于是通过声学原理成像,在很大程度上弥补了光学成像系统受环境光源亮度、水体透明度及环境对比度限制的缺陷,能在较浑浊水体中获得较好的图像效果,正好可以应用于水工建筑物的水下检测;同时,双频识别声纳体积小、重量轻,系统安装简便,小船、小艇即可运载工作,便于在小型水工建筑物及水利水电技术第45卷2014年第7期
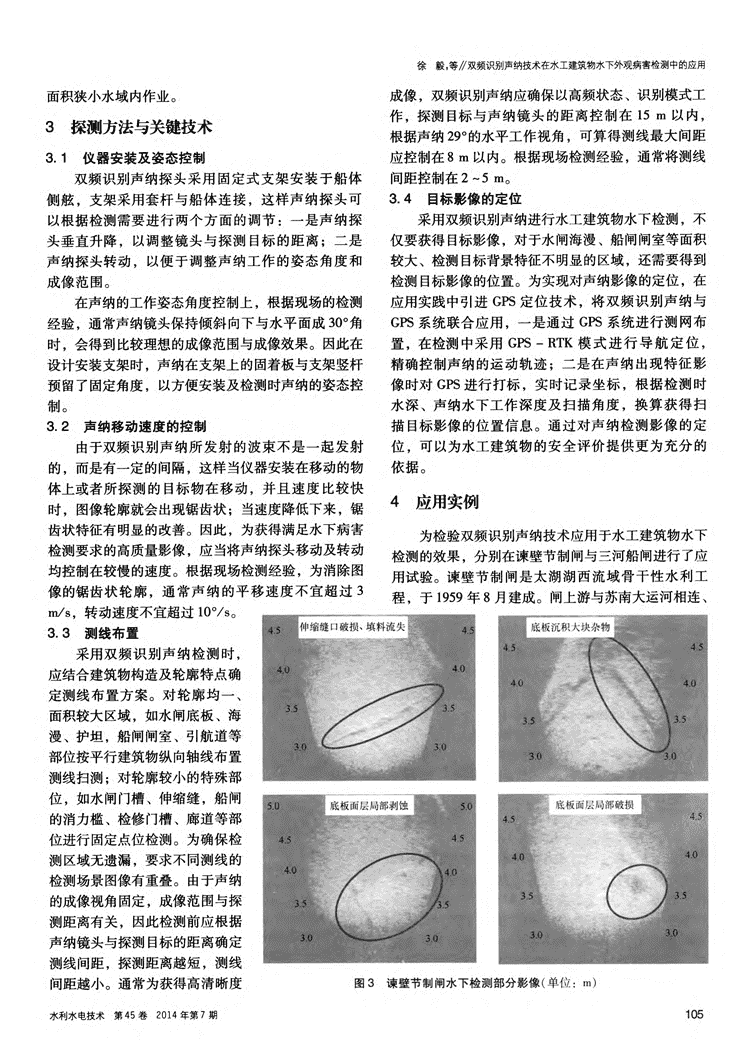
面积狭小水域内作业。3探测方法与关键技术3.1仪器安装及姿态控制双频识别声纳探头采用固定式支架安装于船体侧舷,支架采用套杆与船体连接,这样声纳探头可以根据检测需要进行两个方面的调节:一是声纳探头垂直升降,以调整镜头与探测目标的距离;二是声纳探头转动,以便于调整声纳工作的姿态角度和成像范围。在声纳的工作姿态角度控制上,根据现场的检测经验,通常声纳镜头保持倾斜向下与水平面成30。角时,会得到比较理想的成像范围与成像效果。因此在设计安装支架时,声纳在支架上的固着板与支架竖杆预留了固定角度,以方便安装及检测时声纳的姿态控制。3.2声纳移动速度的控制由于双频识别声纳所发射的波束不是一起发射的,而是有一定的间隔,这样当仪器安装在移动的物体上或者所探测的目标物在移动,并且速度比较快时,图像轮廓就会出现锯齿状;当速度降低下来,锯齿状特征有明显的改善。因此,为获得满足水下病害检测要求的高质量影像,应当将声纳探头移动及转动均控制在较慢的速度。根据现场检测经验,为消除图像的锯齿状轮廓,通常声纳的平移速度不宜超过3m/s,转动速度不宜超过10。/s。3.3测线布置采用双频识别声纳检测时,应结合建筑物构造及轮廓特点确定测线布置方案。对轮廓均一、面积较大区域,如水闸底板、海漫、护坦,船闸闸室、引航道等部位按平行建筑物纵向轴线布置测线扫测;对轮廓较小的特殊部位,如水闸门槽、伸缩缝,船闸的消力槛、检修门槽、廊道等部位进行固定点位检测。为确保检测区域无遗漏,要求不同测线的检测场景图像有重叠。由于声纳的成像视角固定,成像范围与探测距离有关,因此检测前应根据声纳镜头与探测目标的距离确定测线间距,探测距离越短,测线间距越小。通常为获得高清晰度水利水电技术第45卷2014年第7期徐毅,等∥双频识别声纳技术在水工建筑物水下外观病害检测中的应用成像,双频识别声纳应确保以高频状态、识别模式工作,探测目标与声纳镜头的距离控制在15m以内,根据声纳29。的水平工作视角,可算得测线最大间距应控制在8m以内。根据现场检测经验,通常将测线间距控制在2~5m。3.4目标影像的定位采用双频识别声纳进行水工建筑物水下检测,不仅要获得目标影像,对于水闸海漫、船闸闸室等面积较大、检测目标背景特征不明显的区域,还需要得到检测目标影像的位置。为实现对声纳影像的定位,在应用实践中引进GPS定位技术,将双频识别声纳与GPS系统联合应用,一是通过GPS系统进行测网布置,在检测中采用GPS—RTK模式进行导航定位,精确控制声纳的运动轨迹;二是在声纳出现特征影像时对GPS进行打标,实时记录坐标,根据检测时水深、声纳水下工作深度及扫描角度,换算获得扫描目标影像的位置信息。通过对声纳检测影像的定位,可以为水工建筑物的安全评价提供更为充分的依据。4应用实例为检验双频识别声纳技术应用于水工建筑物水下检测的效果,分别在谏壁节制闸与三河船闸进行了应用试验。谏壁节制闸是太湖湖西流域骨干性水利工程,于1959年8月建成。闸上游与苏南大运河相连、图3谏壁节制闸水下检测部分影像(单位:m)105
徐毅,等∥双频识别声纳技术在水工建筑物水下外观病害检测中的应用图4三河船闸水下检测部分影像(单位:m)下游与长江相通,共15孑L,每孔净宽3.8m,总净宽57m,2009年4月经安全鉴定为“四类闸”,需拆除重建;三河船闸工程是洪泽湖大堤的穿堤建筑物,上闸首切洪泽湖大堤入洪泽湖,下游经淮河人江水道三河段、石港船闸、金宝航道和南运西船闸连通大运河,建成于1970年3月,设计年通航能力180万t,建成后已历经多次维修加固。谏壁节制闸与三河船闸均为建成年代久、运行频繁的大中型水工建筑物,同时所在水域的水体浑浊度明显,具有一定的代表性。谏壁节制闸检测时长江侧潮位4.70m,闸室水深5.1m左右,声纳探头水下工作深度3.0m,探测目标距离控制在5m以内,测线间距2m,双频识别声纳检测影像如图3所示。三河船闸检测时,闸室及下游海漫段水深3.0m左右,声纳探头水下工作深度1.0m,探测目标距离控制在5m以内,测线间距2m,双频识别声纳检测影像如图4所示。从图3和图4中可清晰地看出水工建筑物水下结构的破损或淤积等情况,为水工建筑物的水下检测提供了直观、可记录的影像资料。特别对于船闸廊道这样空间狭小、潜水探摸实施困难的部位,采用双频识别声纳检测更可以充分发挥其体积小、操纵灵活的优势。DIDSON双频识别声纳的采集软件还提供了可量测影像目标范围尺寸的measure功能,如图3和图4106中可通过该量测功能,得到谏壁闸闸室底板面层破损尺寸约为0.3mX0.27m,三河船闸廊道冲坑破损尺寸约为0.64m×0.58m。检测完毕,根据声纳检测中实时记录的GPS坐标,以及检测实时水深、声纳工作深度及扫描角度,换算获得扫描目标影像的位置信息,从而实现了对水下目标的定位。5结语双频识别声纳技术具有明显的技术优点:(1)通过声学原理成像,弥补了光学成像系统受环境光源亮度、水体透明度及环境对比度限制的缺陷,可以高频状态、识别模式工作获得分辨率较高图像,在浑浊、昏暗水体中也能清晰成像。(2)为水工建筑物的水下外观病害检测提供直观、连续、可记录的影像资料。(3)操作简便、灵活,尤其可实现对空间狭小、潜水探摸实施困难部位的有效检测,工作效率高,检测成本低。(4)与GPS系统联合应用,实现对水下检测目标影像的定位。虽然双频识别声纳对水下目标的检测效果较好,但由于水工建筑物水下病害形式多样、分布范围不一,而双频识别声纳的成像效果对其工作姿态、拍摄距离要求较高。目前用于安装声纳探头的多为简易的固定式支架,操控不便且对声纳工作姿态及角度的控制较为粗放,对水下目标影像定位的准确程度也有一定影响,有待于进一步研究改进。参考文献:[1]洪晓林,柯敏勇,金初阳,等.水闸安全检测与评估分析[M].北京:中国水利水电出版社,2007.[2]王德俊.自浮式气压沉柜在谏壁闸水下检修中的应用与改进[J].江苏水利,2009(10):21.24.[3]SL75—94,水闸技术管理规程[s].[4]中国海洋学会.第二十一届海洋测绘综合性学术研讨会论文集[c].成都:中国测绘学会,2009.[5]张进.基于双频识别声纳DIDSON的鱼群定量评估技术[D].上海:上海海洋大学,2012.(责任编辑郭利娜)水利水电技术第45卷2014年第7期'
您可能关注的文档
- 水工建筑物塑性嵌缝密封材料技术标准,DL_T949-2005.pdf
- 水工建筑物抗冲磨防空蚀混凝土技术规范,DL_T5207-2005.pdf
- 水工建筑物强震动安全监测技术规范,DL_T5416-2009.pdf
- 水工建筑物岩石基础开挖工程施工技术规范,SL47-94.pdf
- 水工建筑物滑动模板施工技术规范,SL32-2014.pdf
- 水工建筑物地下开挖工程施工规范,SL378-2007.pdf
- 输水渠道水工建筑物的维护管理.pdf
- 水工建筑物防渗堵漏施工技术探析.pdf
- 水工建筑物及水库测量(ppt48).ppt
- 水工建筑物--第二章水利水电枢纽工程设计方法.ppt
- 河海大学《水工建筑物》第八章渡槽.ppt
- 水工建筑物紫铜片止水设计要点分析.pdf
- 水工建筑物裂缝补强处理措施.pdf
- 水工建筑物抗冰冻的有效措施.pdf
- 水工建筑物复合地基压缩模量计算方法研究.pdf
- 水工建筑物墩墙温度应力分析与抗裂暗梁的设计研究.pdf
- 生态水工建筑物——鱼道的建设及研究进展.pdf
- 试析水电站水工建筑物维护项目的标准化管理.pdf